The dung beetle robot has learned to push balls faster and more skillfully than its real-life counterpart.

Dung beetles are remarkable for their ability to roll balls made of animal feces that can weigh more than themselves. Additionally, these insects are multitaskers, capable of walking while simultaneously pushing an object, whether on flat ground or over obstacles.
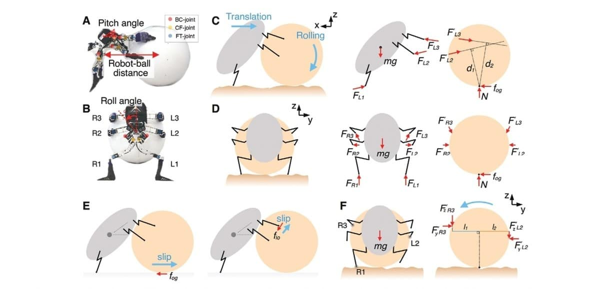
This time, engineers have uncovered the neural mechanisms behind the beetles' movements, skillfully controlling their six legs to maneuver and manipulate the balls. Robotics experts from the Vidyasirimedhi Institute of Science and Technology (Thailand) and a zoologist from the Christian-Albrechts-University of Kiel (Germany) relied on previous observations. It was found that dung beetles use their front legs to push and walk backward while grasping the ball with their middle and hind legs.
As a result, the scientists designed a six-legged robot named ALPHA. They based its design on the natural "configuration" of a stick insect and then modified it. Instead of using machine learning, which is often employed in robotics, the engineers implemented modular neuro-control for the locomotion manipulators installed on the robot's "limbs."
During the experiment, the robot rolled two types of balls: a blue soft rubber fitness ball and a white hard fiberglass ball (used for marking high-voltage power lines to prevent aircraft collisions). Both balls had a diameter of 60 centimeters (1.7 times the length of the robot's leg, which is nearly equivalent to the proportions of a living counterpart), with weights of 2 and 4.6 kilograms respectively (the robot itself weighed 4.7 kilograms).
The "dung beetle" robot rolled the balls over flat (laminate floor) and uneven (hard soil with sand) surfaces. Successfully completing a distance of at least three meters was considered a success. To prevent the legs from slipping, the researchers attached soft pads resembling the rays of a fish fin, which added speed to ALPHA.
Thus, the scientists achieved a morphology that closely matches that of previous insect-robot creators. Moreover, in their experiment, the engineers went further by testing the robot on uneven terrain and presenting it with multiple tasks simultaneously. ALPHA demonstrated high efficiency across all criteria, including load capacity, payload mass, and object transportation speed. The team also endowed the beetle robot with a function not available in other designs—the ability to manipulate and move large objects using a small support area.
The dynamism and performance exhibited by the robot could have practical applications in various fields, the researchers noted. For instance, in construction, this development could be used to transport hollow plastic spherical balls that replace a significant portion of concrete mass in the innovative Bubble Deck technology.
Another potential application for this technology lies in delivering food and medicine housed within hollow spheres to disaster victims during search-and-rescue operations. The robots could also be deployed to pass tools to transportation inspectors or to roll round bales of hay across fields.
The scientific work has been published in the journal Advanced Science.